
I am a Mechanical Engineering Ph.D. student at the University of California Berkeley. My work primarily focuses on multi-robot path planning and exploration. In future projects, I hope to extend this to heterogeneous multi-robot systems and address uncertainty and task distribution problems to hopefully establish a fully autonomous search and exploration algorithm capable of mapping unknown regions.
I work in the ICON Lab under the advisement of Dr. Negar Mehr. Previously, I worked in the Intelligent Autonomy Lab at Yale University under Dr. Ian Abraham.
Updates
- Feb 2026 MIMIC-D: Multi-modal Imitation for MultI-agent Coordination with Decentralized Diffusion Policies was accepted to ICRA
- Sep 2025 Began internship at Honda Research Institute USA
- May 2025 Offered the National Defense Science and Engineering Graduate Fellowship (NDSEG)
- Dec 2024 Ergodic Exploration over Meshable Surfaces was accepted to ICRA
- Dec 2024 Leveraging Large Language Models for Effective and Explainable Multi-Agent Credit Assignment was accepted to AAMAS
- Aug 2024 Started as a Ph.D. student at UC Berkeley
- Jul 2024 Time-Optimal Ergodic Search: MultiScale Coverage in Minimum Time was accepted to IJRR
- May 2024 Graduated Magna Cum Laude from Yale University
- Apr 2024 Awarded Honorable Mention for Computing Research Association's Outstanding Undergraduate Researcher Award
- May 2024 Accepted to the Mechanical Engineering Ph.D. program at UC Berkeley with the Berkeley Fellowship
- Jul 2023 Time Optimal Ergodic Search won the Best Paper Award at RSS 2023!
- May 2023 Began the RISS program at Carnegie Mellon University
- Apr 2023 Time Optimal Ergodic Search was accepted to RSS 2023
- Jan 2023 Safety-critical Ergodic Exploration in Cluttered Environments via Control Barrier Functions was accepted to ICRA 2023
Research
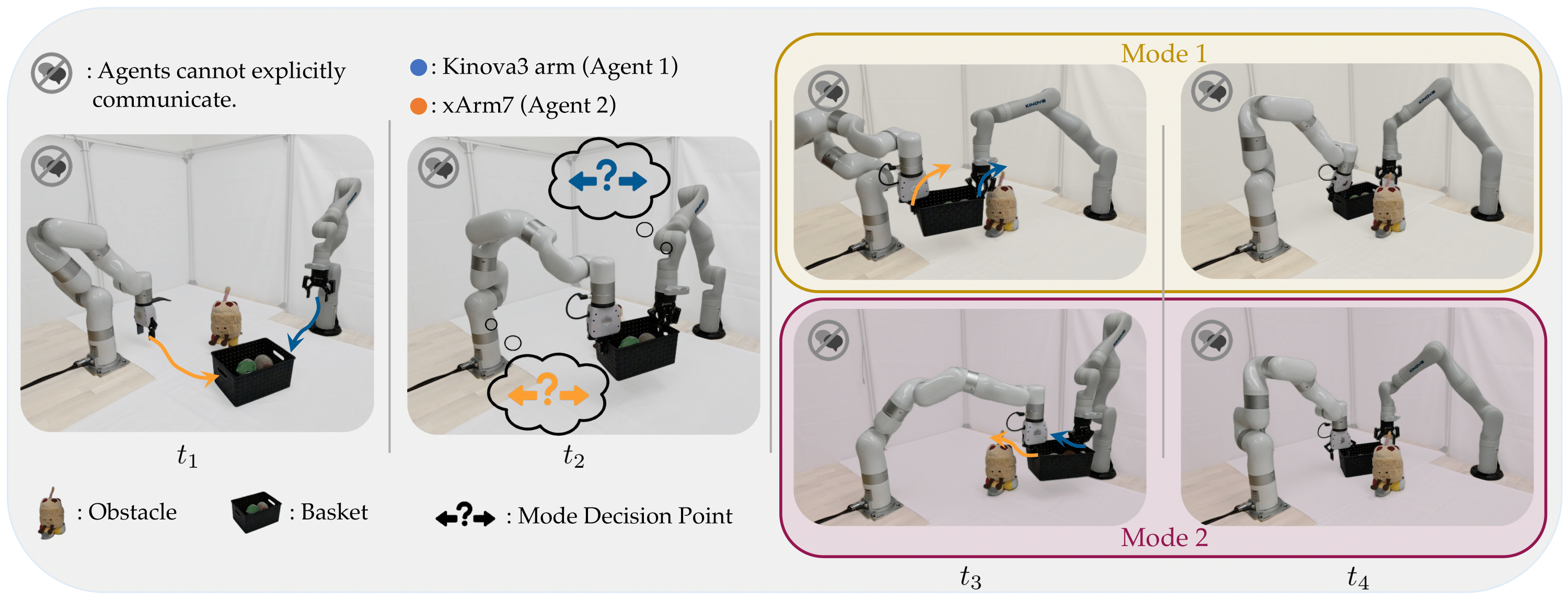 MIMIC-D: Multi-modal Imitation for MultI-agent Coordination with Decentralized Diffusion Policies
MIMIC-D: Multi-modal Imitation for MultI-agent Coordination with Decentralized Diffusion Policies
Dayi Ethan Dong*,
Maulik Bhatt*,
Seoyeon Choi,
Negar Mehr
International Conference on Robotics and Automation (ICRA) 2026
Website •
Github •
Paper
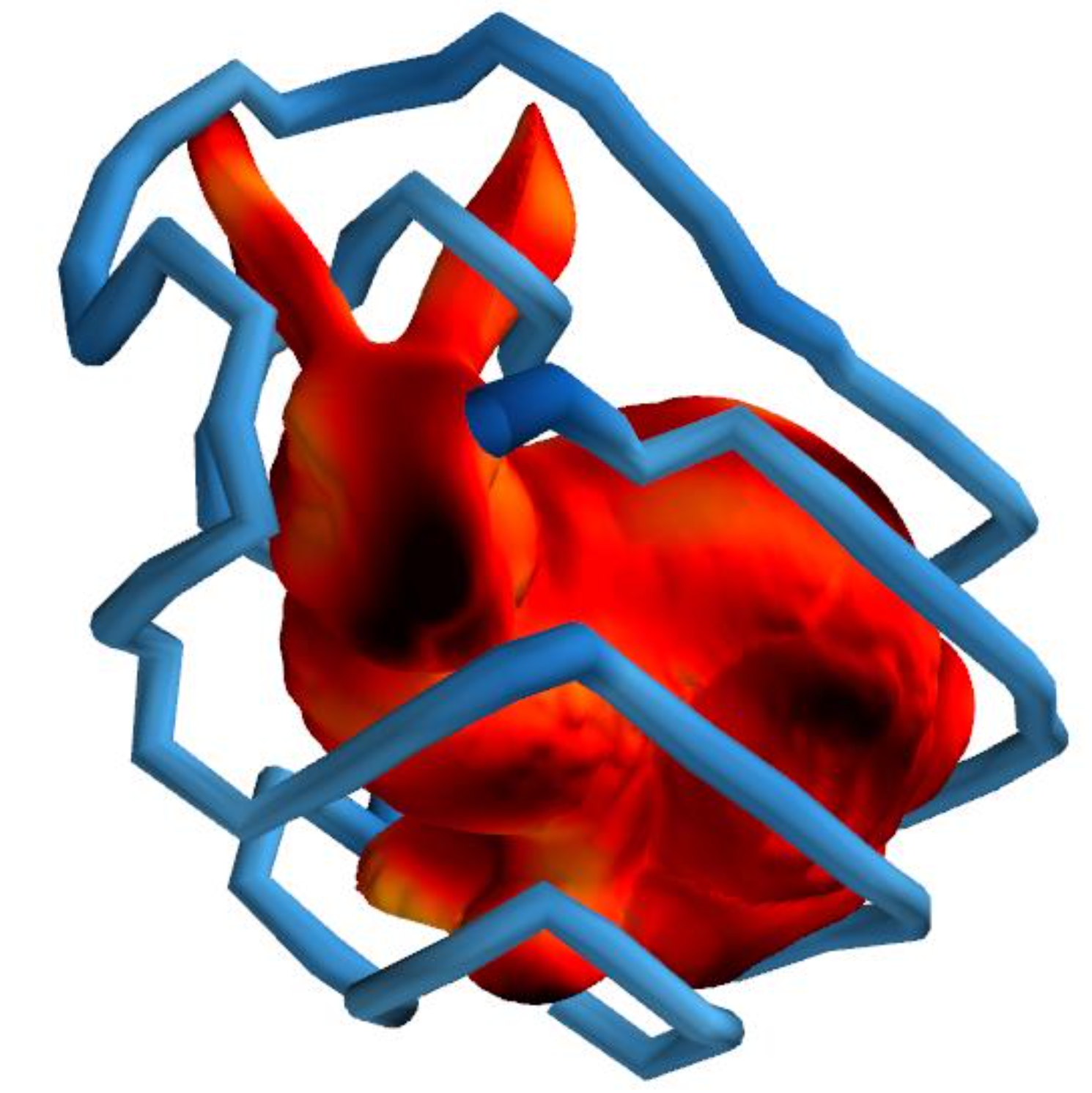 Ergodic Exploration over Meshable Surfaces
Ergodic Exploration over Meshable Surfaces
Dayi Ethan Dong,
Albert Xu,
Ian Abraham,
Howie Choset
International Conference on Robotics and Automation (ICRA) 2025
Paper
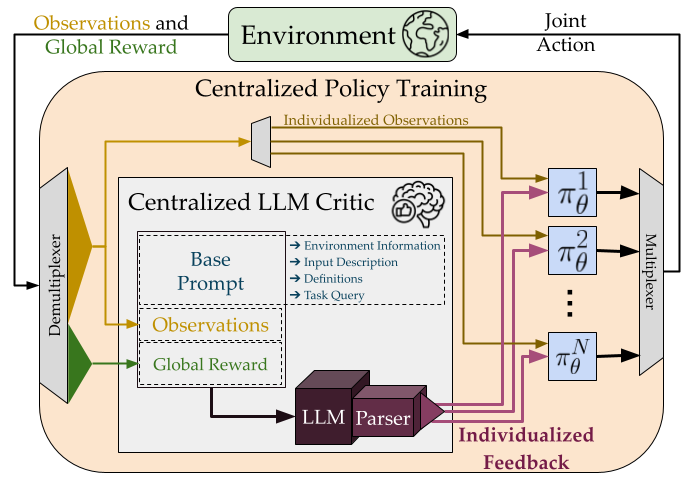 Leveraging Large Language Models for Effective and Explainable Multi-Agent Credit Assignment
Leveraging Large Language Models for Effective and Explainable Multi-Agent Credit Assignment
Kartik Nagpal,
Dayi Ethan Dong,
Jean-Baptiste Bouvier,
Negar Mehr
Autonomous Agents and Multiagent Systems (AAMAS) 2025
Website •
Paper
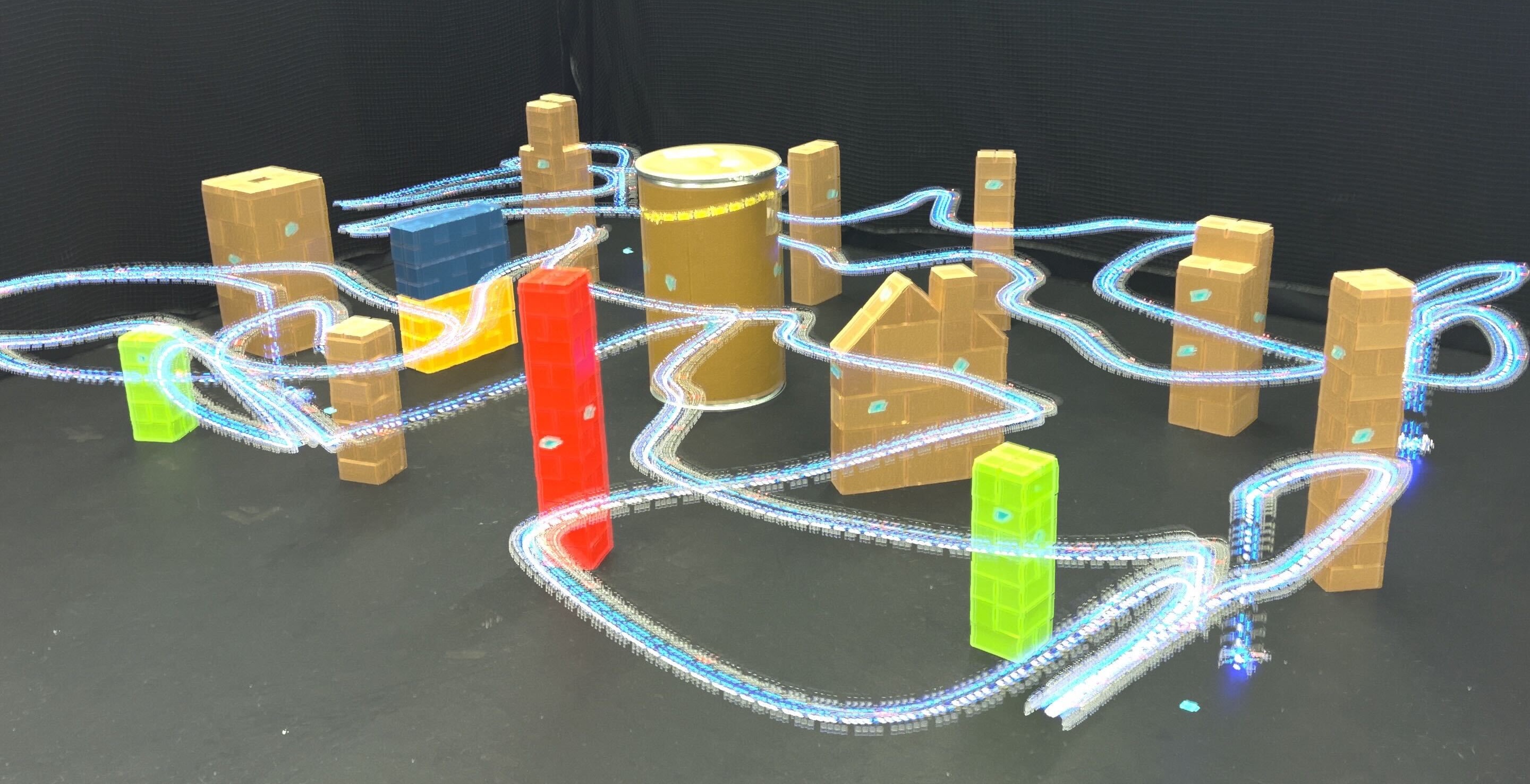
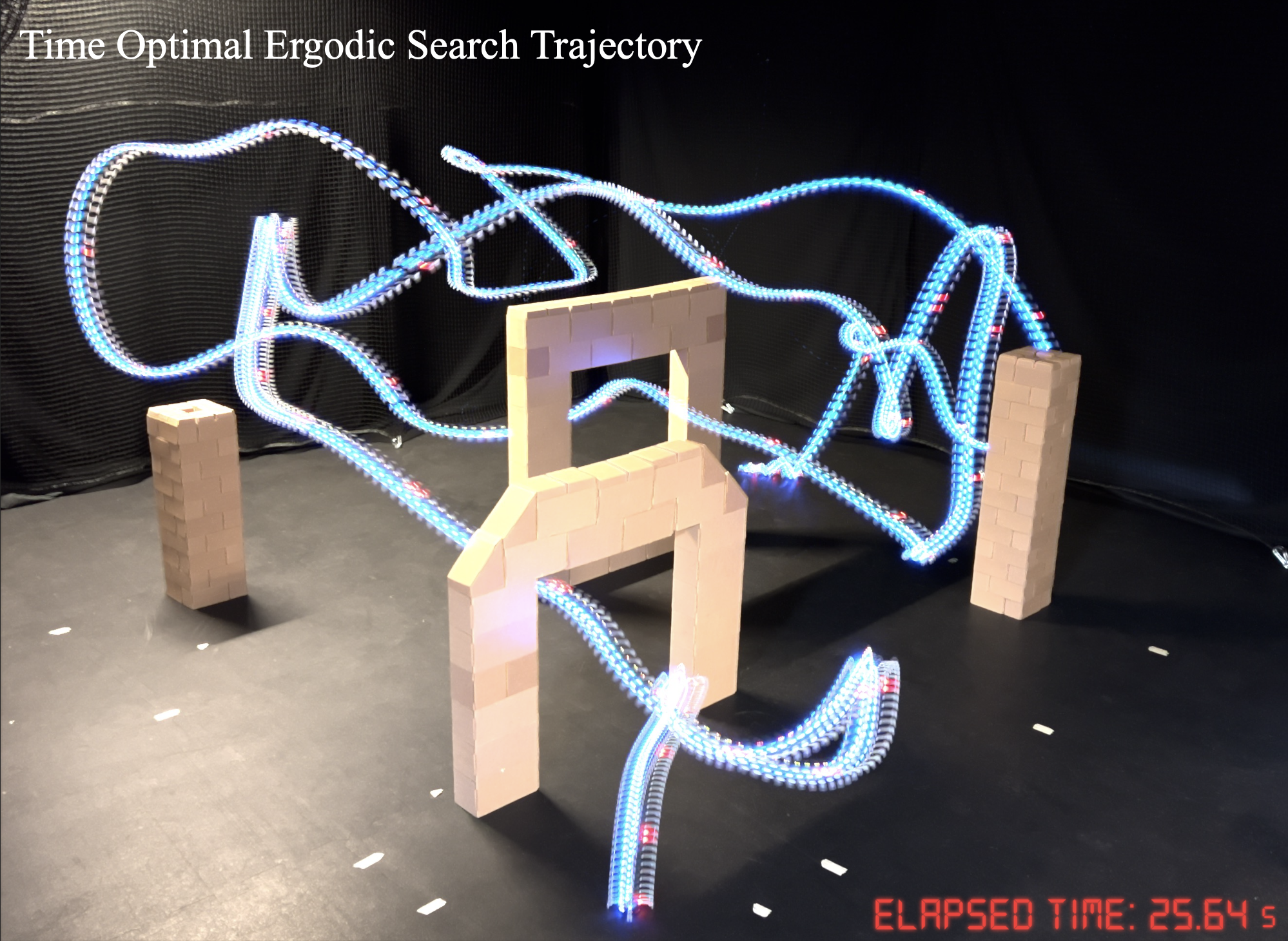 Time-optimal Ergodic Search: Multiscale Coverage in Minimum Time
Time-optimal Ergodic Search: Multiscale Coverage in Minimum Time
Dayi Ethan Dong,
Henry Berger,
Ian Abraham
International Journal of Robotics Research
Github •
Paper
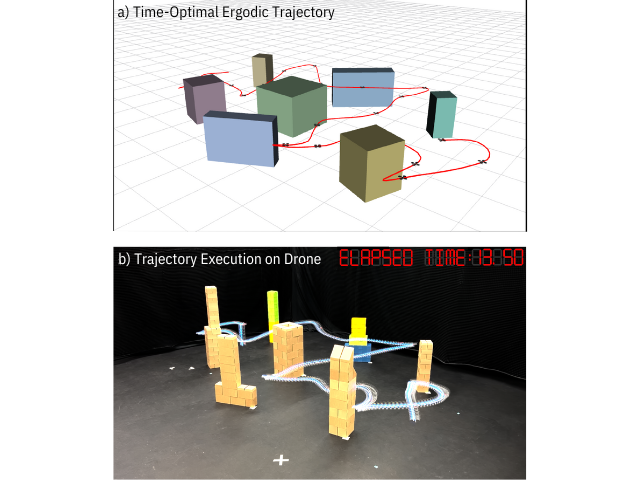 Time Optimal Ergodic Search
Time Optimal Ergodic Search
Dayi Ethan Dong,
Henry Berger,
Ian Abraham
Robotics: Science and Systems (RSS) 2023
Best Paper Award •
Github •
Paper
 Safety-critical Ergodic Exploration in Cluttered Environments via Control Barrier Functions
Safety-critical Ergodic Exploration in Cluttered Environments via Control Barrier Functions
Cameron Lerch,
Dayi Ethan Dong,
Ian Abraham
International Conference on Robotics and Automation (ICRA) 2023
Github •
Paper